

Umumé dipercaya yen sabuk conveyor drive konfigurasi piranti dhuwur banget, iku sampah sumber. Nanging, kanggo peralatan gedhe, yen kurang banget, bakal nyebabake ketegangan dinamis mundhak nalika sabuk diwiwiti, lan malah nyebabake sabuk resonate. Cara milih piranti nyopir kanthi wajar minangka kunci ing desain conveyor sabuk. Iku uga masalah tombol apa desain cukup, operasi normal, lan biaya pangopènan lan volume pangopènan kurang. Artikel iki nganalisa aplikasi, kaluwihan lan cacat saka sawetara cara nyopir umum kanggo referensi.

1. Roller listrik
Drum listrik dipérang dadi drum listrik sing dibangun lan drum listrik eksternal. Bentenane utama ing antarane yaiku motor drum listrik sing dipasang ing jero drum, dene motor drum listrik eksternal dipasang ing njaba drum lan disambungake kanthi kaku menyang drum.
Drum listrik sing dibangun nduweni boros panas sing kurang amarga motor dipasang ing jero drum. Umume digunakake ing conveyor sabuk kanthi daya kurang saka 30kw lan dawane kurang saka 150m. Amarga motor dipasang ing njaba drum, drum listrik eksternal nduweni boros panas sing luwih apik. Umume digunakake ing conveyor sabuk kanthi daya kurang saka 45kw lan dawane kurang saka 150m.
Kaluwihan: struktur kompak, biaya pangopènan murah, linuwih dhuwur, piranti nyopir lan roller transmisi digabungake dadi siji.
Cacat: Kinerja wiwitan alus sing ora apik, pengaruh gedhe ing jaringan listrik nalika motor diwiwiti. Keandalan luwih elek tinimbang motor tipe Y + kopling + metode drive reducer.
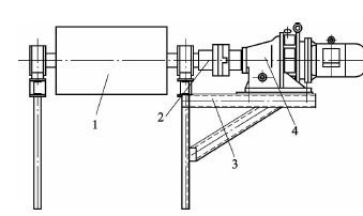
2. Mode nyopir miskin saka motor tipe Y + kopling + reducer
Kaluwihan: struktur prasaja, beban kerja pangopènan cilik, biaya pangopènan sing murah lan linuwih.
Cacat: Kinerja wiwitan alus sing ora apik, pengaruh gedhe ing jaringan listrik nalika motor diwiwiti. Umume digunakake ing conveyor sabuk kanthi daya kurang saka 45kw lan dawane kurang saka 150m.
3. Y-jinis motor + torsi matesi kopling adi + reducer
Iki minangka piranti nyopir sing akeh digunakake ing conveyor sabuk, sing umume digunakake ing conveyor sabuk kanthi daya siji kurang saka 630kw lan dawane kurang saka 1500m.
Kopling adi watesan persegi dowo dipérang dadi kopling adi watesan persegi dowo karo kamar tambahan mburi lan kopling adi watesan persegi dowo tanpa kamar tambahan mburi. Amarga mantan alon-alon mlebu ing rongga kerja kopling cairan liwat bolongan throttle liwat kamar tambahan mburi nalika motor diwiwiti, kinerja wiwitane luwih apik tinimbang sing terakhir.
Yen siji karo kamar tambahan mburi dipilih, nalika loro model kopling adi bisa ketemu daya transmisi sawijining, amarga wektu wiwitan dawa lan generasi panas gedhe saka kopling adi, jinis luwih gedhe saka kopling adi kudu disenengi.
Yen siji tanpa kamar tambahan mburi dipilih, nalika loro model saka kopling adi bisa ketemu daya transmisi sawijining, jinis cilik kopling adi kudu disenengi amarga wektu wiwitan kopling adi cendhak lan generasi panas cilik.
Kanggo conveyors sabuk mimpin dening macem-macem Motors, yen cara drive iki dipilih, kang dianjurake kanggo milih kopling adi karo mburi kamar tambahan torsi matesi kopling adi jinis.
Kaluwihan: biaya-efektif, struktur prasaja lan kompak, workload pangopènan cilik, biaya pangopènan kurang, kakehan motor pangayoman, nalika macem-macem Motors mimpin, daya motor bisa imbang, wektu tundha wiwitan bisa dipérang dadi stasiun, lan impact ing kothak daya nalika conveyor sabuk wis suda, linuwih dhuwur, rega kurang, lan iku luwih saka mode nyopir kurang saka 10 m conveyor saka 10 m.
Cacat: Kinerja wiwitan alus kurang, lan ora cocok kanggo conveyor sabuk sing digunakake kanggo conveyor sabuk transportasi mudhun, lan conveyor sabuk sing mbutuhake fungsi regulasi kacepetan.
4. Y-jinis motor + kacepetan-ngatur adi kopling + reducer
Cara nyopir sing umum digunakake kanggo conveyor sabuk gedhe, sing umume digunakake ing conveyor sabuk gedhe jarak adoh kanthi dawane luwih saka 800m.
Kaluwihan: struktur prasaja, beban kerja pangopènan kakehan cilik, motor diwiwiti tanpa beban, motor kakehan, nalika sawetara motor didorong, bisa ditundha kanggo miwiti, nyuda impact conveyor sabuk ing kothak daya nalika diwiwiti, linuwih luwih dhuwur, kinerja wiwitan alus luwih apik, lan nduweni kinerja wiwitan sing bisa dikontrol, yaiku wektu wiwitan sing bisa dikontrol, yaiku wektu sing bisa dikontrol. bisa dikontrol, lan regane murah.
Cacat: Nalika kopling adi diwiwiti, amarga owah-owahan volume lenga lan kurva owah-owahan kacepetan saka rongga kerja kopling adi non-linear lan duwe mundur, respon dinamis sing bisa dikontrol alon, lan angel nindakake kontrol loop tertutup, lan kadhangkala ana bocor lenga. Ora cocok kanggo conveyor sabuk conveyor mudhun, lan conveyor sabuk karo fungsi regulasi kacepetan dibutuhake.

5. Y-jinis motor + piranti drive CST
Y-jinis motor + piranti drive CST dirancang kanggo conveyor sabuk dening Dodge Company saka Amerika Serikat, karo linuwih saka piranti drive mekatronik, umume digunakake ing long-distance sabuk conveyor gedhe karo dawa luwih saka 1000m.
Kaluwihan: kinerja alus alus wiwitan, linear lan kurva kacepetan kontrol nalika miwiti, kurva kacepetan controllable nalika parking, kontrol loop tertutup bisa rampung, motor ora mbukak wiwitan, struktur prasaja, pangopènan workload cilik, nalika sawetara Motors mimpin, bisa telat kanggo miwiti ing orane tumrap sekolah, lan ngurangi impact saka conveyor sabuk ing kothak daya nalika miwiti.
Cacat: syarat dhuwur kanggo buruh pangopènan lan lenga pelumas, rega peralatan dhuwur. Ora cocok kanggo conveyor sabuk conveyor mudhun, lan conveyor sabuk karo fungsi regulasi kacepetan dibutuhake.
6. Winding motor + reducer
Ana telung mode kontrol nduwurke tumpukan motor + reducer:
Jinis pisanan: tatu motor senar frekuensi resistor utawa resistance banyu;
Ora ana fungsi regulasi kacepetan, lan motor ora bisa diwiwiti kanthi kerep, umume digunakake ing conveyor sabuk kanthi dawane luwih saka 500m lan motor ora kerep diwiwiti.
Tipe kapindho: kawat-tatu motor senar logam resistor;
Ora ana fungsi regulasi kacepetan, nanging motor bisa diwiwiti kanthi asring, lan sawise ngerem nganggo tenaga thyristor, iki minangka cara nyopir umum kanggo conveyor sabuk mudhun.
Jinis katelu: regulasi kacepetan cascade motor nduwurke tumpukan.
Nduwe fungsi regulasi kacepetan, bisa digunakake kanggo kontrol loop tertutup, lan umume digunakake ing conveyor sabuk gedhe kanthi jarak sing luwih saka 1000m lan fungsi regulasi kacepetan.
Kaluwihan: cara kontrol pisanan lan kaloro, struktur prasaja, beban kerja pangopènan cilik, kinerja wiwitan alus, rega murah, impact cilik ing kothak daya nalika miwiti, linuwih dhuwur, kinerja kontrol apik; Mode kontrol katelu nduweni kinerja rem daya banget.
Cacat: mode kontrol pisanan lan kaloro duwe konsumsi energi gedhe nalika miwiti lan mandheg; Sistem mode kontrol katelu rumit, lan ana cenderung diganti dening frekuensi gantian utawa frekuensi gantian.
7. Dhuwur-kacepetan DC motor + reducer
Mode drive kanthi fungsi regulasi kacepetan, sing umume digunakake ing conveyor sabuk gedhe sing mbutuhake fungsi regulasi kacepetan.
Kaluwihan: kinerja alus wiwitan apik, kurva kacepetan kontrol linear nalika miwiti, kurva kacepetan kontrol linear nalika parkir, kinerja rem electrical apik, owah-owahan kacepetan stepless, kinerja controllable banget, bisa nindakake kontrol loop tertutup, linuwih dhuwur.
Cacat: regane larang banget, sistem penyearah thyristor kompleks, peralatan kontrol elektronik kalebu area sing gedhe, faktor daya kurang, motor DC duwe cincin slip, nyandhang sikat gedhe, beban kerja pangopènan gedhe, saiki ora ana jinis bledosan, lan ora bisa digunakake ing tambang batu bara.

8. Motor DC kacepetan kurang langsung nyopir roller drive saka conveyor sabuk
Mode nyopir kanthi fungsi regulasi kacepetan umume digunakake ing conveyor sabuk gedhe sing mbutuhake fungsi regulasi kacepetan lan conveyor sabuk kanthi daya motor siji luwih saka 1000kw.
Kaluwihan: kinerja wiwitan alus banget, kurva kacepetan kontrol linear nalika miwiti, kurva kacepetan kontrol linear nalika parkir, kinerja rem electrical apik, owah-owahan kacepetan stepless, kinerja kontrol banget, kontrol loop tertutup, ora reducer, linuwih dhuwur.
Cacat: regane larang banget, sistem rectifier thyristor kompleks, peralatan kontrol elektronik kalebu area sing gedhe, faktor daya kurang, motor DC duwe cincin slip, nyandhang sikat gedhe, beban kerja pangopènan gedhe, lan jinis sing ora tahan bledosan daya dhuwur saiki ora bisa digunakake ing tambang batu bara.
9. kacepetan konversi frekuensi ngatur motor + reducer
Ana rong cara kontrol kanggo motor kacepetan konversi frekuensi + reducer:
Jinis pisanan: intersecting lan gantian konversi frekuensi
Faktor daya sistem konversi frekuensi gantian kurang, lan akeh harmonik urutan dhuwur bakal diasilake sajrone wiwitan lan operasi, sing bakal nyebabake polusi ing jaringan listrik. Wiwitan motor sing kerep uga bakal nyebabake pengaruh daya reaktif sing gedhe ing jaringan listrik, sing kudu dikelola kanthi lengkap. Investasi ing peralatan konversi frekuensi relatif kurang.
Jinis kapindho: interchange wis konversi frekuensi gantian
Amarga kasunyatan manawa sistem konversi frekuensi gantian dilengkapi unit panyaring lan unit ganti rugi ing piranti kasebut, faktor daya luwih saka 0,9, komponen harmonik sing luwih dhuwur cilik banget, lan ora bakal nyebabake polusi harmonik, lan ora perlu nyiyapake panyerepan harmonik lan piranti kompensasi daya reaktif, nanging daya siji luwih gedhe tinimbang 2000. lan spare parts kudu diimpor, kang relatif dhuwur ing investasi pisanan. Biasane digunakake ing conveyor sabuk gedhe sing mbutuhake fungsi regulasi kacepetan.
Kaluwihan: kinerja wiwitan alus banget, kurva kacepetan kontrol linear nalika miwiti, kurva kacepetan kontrol linear nalika parkir, kinerja rem electrical apik, owah-owahan kacepetan stepless, kinerja kontrol banget, kontrol loop tertutup, linuwih dhuwur.
Cacat: regane larang banget, peralatan kontrol elektronik kalebu area sing gedhe, daya siji saiki luwih gedhe tinimbang jinis non-bledosan 400kw, ora bisa digunakake ing tambang batu bara.
Liwat analisis ndhuwur kaluwihan lan cacat saka macem-macem mode nyopir conveyor sabuk, nalika milih piranti drive saka conveyor sabuk:
Kanggo conveyors sabuk sing ora perlu angger kacepetan lan dawa conveyor sabuk kurang saka 1500m, Y-jinis motor + torsi matesi kopling adi + reducer iku mode driving preferred sawijining, ngiring dening nduwurke tumpukan motor + reducer (mode kontrol punika nduwurke tumpukan motor senar resistance logam);
Yen dawa conveyor sabuk luwih saka 1500m, piranti drive Y-jinis + CST drive cara nyopir preferred, ngiring dening motor Y-jinis + kacepetan-ngatur adi coupling + reducer.
Yen volume lalu lintas saka conveyor sabuk owah-owahan banget lan regulasi kacepetan dibutuhake, motor regulasi kacepetan konversi frekuensi + reducer minangka cara nyopir sing disenengi, diikuti karo regulasi kacepetan cascade + reducer motor nduwurke tumpukan.










